Asymptotic Notation
Contents
Asymptotic Notation¶
First, let’s review some asymptotic notation. We’ll see it a fair amount in this course.
Let \(f(x), g(x)\) be some functions. We say $\(f = O(g)\)\( as \)x\to \infty\( if there exists some constant \)c\ge 0\( and \)x_0\ge 0\( so that \) |f(x)| \le c g(x)\( for all \)x \ge x_0$.
We say $\(f = \Omega(g)\)\( as \)x\to \infty\( if there exists some constant \)c\ge 0\( and \)x_0\ge 0\( so that \) |f(x)| \ge c g(x)\( for all \)x \ge x_0$.
Finally, $\(f = \Theta(g)\)\( if \)f = O(g)\( and \)f = \Omega(g)\( (some constant multiples of \)g\( bound \)f$ above and below).
Often we’re interested in bounding worst-case behavior. This means you’ll see a lot of \(O\), and less of \(\Omega\) and \(\Theta\).
You may also see little-o notation such as \(f = o(g)\), or the corresponding \(f = \omega(g)\). In these cases the inequalities are strict. If \(f = o(g)\), then for any \(c > 0\), there exists an \(x_0\ge 0\) so that \(|f(x)| < c g(x)\) for \(x\ge x_0\). If \(f = O(g)\) it can grow at the same rate, but if \(f = o(g)\), it grows at a slower rate.
Note that because we can scale by constant multiples, we typically drop them.
\(O(5x) = O(x)\)
\(O(c) = O(1)\)
\(O(c f(x)) = O(f(x))\)
Examples¶
\(x = O(x)\)
\(x = O(x^2)\)
\(x^a = O(x^b)\) for \(a \le b\)
\(x^a = O(b^x)\) for any \(a, b > 1\)
\(f = O(g)\) and \(g = O(h)\) implies \(f = O(h)\) (exercise: prove this)
\(f = O(g)\) and \(h = O(k)\) implies \(f\times h = O(g \times k)\) (exercise: prove this as well)
Answers to example 5 and 6¶
Answer to example 5:
By definition, since \(f = O(g)\), we know there exists some constant \(p\ge 0\) and \(x_0\ge 0\) so that \( |f(x)| \le p g(x)\) for all \(x \ge x_0\); since \(g = O(h)\), we know there exists some constant \(q\ge 0\) and \(x_1\ge 0\) so that \( |g(x)| \le q h(x)\) for all \(x \ge x_1\). Therefore, we get \( |f(x)| \le p g(x)\) \( \le (p*q) h(x)\) as \(x \ge \) \(max\) {\(x_0\), \(x_1\)}, which implies \(f = O(h)\).
Answer to example 6: Still, by definition, since \(f = O(g)\), we know there exists some constant \(p\ge 0\) and \(x_0\ge 0\) so that \( |f(x)| \le p g(x)\) for all \(x \ge x_0\); since \(h = O(k)\), we know there exists some constant \(q\ge 0\) and \(x_1\ge 0\) so that \( |h(x)| \le q k(x)\) for all \(x \ge x_1\). Now, take \(x'\) = \(max\) {\(x_0\), \(x_1\)}, we know as \(x\ge x'\), we have both \( |f(x)| \le p g(x)\) and \( |h(x)| \le q k(x)\). Therefore, now we have: \(|(f\times h) (x)| \le |f(x)| * |h(x)| \le (p*q) g(x) k(x) = (p*q) (g\times k) (x)\), proved.
Complexity¶
When we talk about computational complexity, we are typically talking about the time or memory resources needed for an algorithm.
For example, if an algorithm operates on an array of \(n\) elements, we say the algorithm runs in \(O(n^2)\) time if the run time scales (at worst) quadratically with the size \(n\).
For example, consider the following function:
import numpy as np
def maximum(x):
"""
returns the maximum value in an array x
"""
xmax = -np.infty
for xi in x:
if xi > xmax:
xmax = xi
return xmax
maximum([1,3,2])
3
our maximum function loops over the list once, and at each step of the iteration we do a constant amount of work. If maximum takes in an array of length n as input, this means there are n iterations of the for-loop, so maximum takes \(O(n)\) time to compute. Note that we don’t need to create any additional arrays, so we can also say maximum uses \(O(1)\) (constant) extra space.
import matplotlib.pyplot as plt
from time import time
ns = [10**k for k in range(1,8)]
ts = []
for n in ns:
a = np.random.rand(n)
start = time()
amax = maximum(a)
end = time()
ts.append(end - start)
plt.loglog(ns, ts)
plt.xlabel('n')
plt.ylabel('time (sec.)')
plt.title('time to compute maximum')
plt.show()
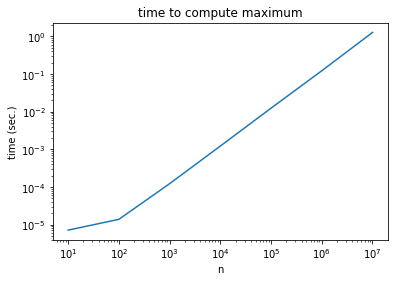
When plotting functions with polynomial complexity (\(O(x^a)\) for some \(a\)), it is standard to use a loglog plot.
Why? If \(t(n) = \Theta(n^a)\), then \begin{align*} t(n) &\sim c n^a\ \log t(n) &\sim a \log n + \log c \end{align*}
I.e. the polynomial exponent is the slope of the line.
ln = np.log(ns)
lt = np.log(ts)
coeff = np.polyfit(ln, lt, 1) # fit a polynomial
coeff[0] # highest degree (linear) term
0.916227608045119
Let’s now consider the following function
def all_subarrays(x):
"""
return all sub-arrays of x
"""
if len(x) == 1:
return [x, []]
else:
ret = []
subs = all_subarrays(x[:-1]) # subarrays with all but the last element
ret.extend(subs) # all subarrrays without the last element
for s in subs:
scpy = s.copy()
scpy.append(x[-1])
ret.append(scpy)
return ret
all_subarrays([0,1,2])
[[0], [], [0, 1], [1], [0, 2], [2], [0, 1, 2], [1, 2]]
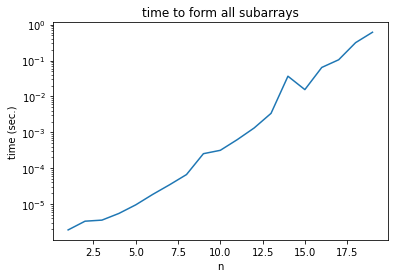
we see that the length of output of all_subarrays grows as \(2^n\), where n = len(x). This is a good hint that the function has exponential time complexity and space complexity \(O(2^n)\).
ns = range(1, 20)
ts = []
for n in ns:
a = [i for i in range(n)]
start = time()
ret = all_subarrays(a)
end = time()
ts.append(end - start)
In this case, it is better to use a semilogy plot.
plt.semilogy(ns, ts)
plt.xlabel('n')
plt.ylabel('time (sec.)')
plt.title('time to form all subarrays')
plt.show()
Exercise¶
Why does a semilogy plot make sense for plotting the time it takes to run a function with exponential time complexity?
How can you interpret the expected slope?
For a function with exponential time complexity, if we do not use semilogy plot, the values on the y-axis could be distributed in a large range. Also, using semilogy plot could provide us a nicer visualization since linear-like pattern could be shown.